دو محقق ايراني در آژانس فضايي كانادا و موسسه ESAB در آمريكا موفق به طراحي يك ربات فضايي شدهاند كه ميتواند به طور خودكار شكل و ترتيب آرايش خود را تغيير دهد.
به گزارش واحد خبر مرکز مطالعات و پژوهش های فلکی ـ نجومی به نقل از سرويس «علمي» خبرگزاري دانشجويان ايران (ايسنا)، رباتي كه براي كار كردن در فضا طراحي ميشود بايد به اصطلاح همه فن حريف باشد و بتواند كارهاي زيادي را به خودي خود و به تنهايي انجام دهد. با در اختيار داشتن چنين رباتي در طول يك ماموريت فضايي، زحمت و هزينه عمليات را براي فضانوردان به ميزان قابل توجهي كاهش ميدهد.
ربات ابداعي فرهاد عقيلي و كوروش پارسا هم كه ميتواند بسيار آسانتر و به شيوه اي فشرده تر از روباتهاي قبلي تغييراتي چون كشش بازوي خود را اعمال كند، قادر است با تغيير شكل خود انواع كارها و عمليات مورد نياز را انجام دهد.
فرهاد عقيلي ــ محقق آژانس فضايي كانادا در كبك - و كورش پارسا از ــ مركز سيستمهاي برش و جوش ESAB در كاروليناي جنوبي - در تشريح دستاورد خود ميگويند: اكثر رباتهاي تغيير پذير فعلي داراي يك طراحي قطعهاي هستند. هر چند ربات هاي قطعهاي ميتوانند شكل و اندازه خود را تغيير دهند، اما براي اين كار به مفاصل پيچيدهاي نياز دارند كه قطعات را به هم متصل كند و همچنين به يك سيستم الحاقي براي تبادل قطعات احتياج دارند.
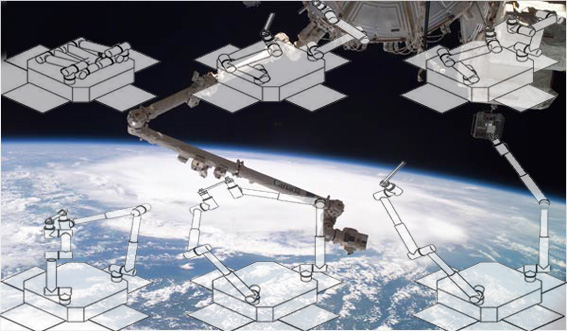
در طرح ابتكاري عقيلي و پارسا، ربات به قطعات نياز ندارد و در عوض از مفاصلي استفاده ميكند كه به بازوها امكان ميدهند طول و موقعيت خود را با توجه به عملياتي كه در دست دارند، تغيير دهند.
اينها مفاصل منفعل سيلندري هستند كه از حسگر استفاده نميكنند.
اين ربات تا حدي شبيه به بازوهاي بيونيك كارگاه گجت است كه البته با دقت بيشتري كنترل ميشوند.
براي تغيير شكل خود ربات مزبور بايد حركت انتهاي بازوي خود را براي كنترل پارامترهاي مفصلي خود محدود كند.
اين مفاصل قفل شدني چندين مزيت نسبت به رباتهاي قطعهاي فعلي دارند كه اصليترين آن سادگي كاربرد آن است.
همچنين ربات ميتواند به طور خودكار شكل خود را تغيير دهد.
به گزارش ايسنا، مهندس عقيلي ميگويد: اين ربات جديد با پشتيباني روشهاي تحليل رياضيات و كنترل ابداع شده است.
سيستم كنترلي كه روي ربات تعبيه شده به طور خودكار درك ميكند كه تغيير شكل صورت گرفته است. تنظيم خودكار كنترل كننده پس از هر بار تغيير شكل يك جنبه مهم ديگر در اين روبات است.
اين نوع ربات شكل پذير ميتواند كاربردهاي بسياري در فضا داشته باشد از جمله انجام بازرسيها، مونتاژ ابزار و حمل و جابجايي اشياء و اجسام .
عقيلي ميگويد: اين ربات همچنين در معدن كاري، تاسيسات نيروگاه هستهيي و ارتش نيز قابل استفاده است.
وي تاكيد كرد: دستگاه كنترل كننده شاتل فضايي سازمان فضايي آمريكا (ناسا) تاكنون اين وظايف را در ماموريتهاي فضايي به مدت بيش از دو دهه انجام داده است، اما با رسيدن زمان بازنشستگي شاتل وجود چنين رباتي با ويژگي پرتاب آسان و با مفاصل تلسكوپي آن براي اكتشافات فضايي در آينده بسيار حائز اهميت و مفيد است.